

Учебная работа. Реферат: Об одном кулисно-рычажном механизме
Смоляков Андрей Анатольевич, старший научный сотрудник РФЯЦ-ВНИИЭФ .
Уповалов Вячеслав Владимирович, научный сотрудник РФЯЦ-ВНИИЭФ .
Предлагается к рассмотрению кулисно-рычажный механизм, в котором осуществляется преобразование вращательного движения кулачка в качание кулисы. Механизм может быть реализован двумя способами, как показано на рис. 1 и 2. Устройство состоит из кулачка, вращающегося вокруг постоянной оси, и кулисы с двумя направляющими. Кулиса, с жестко заделанными направляющими, качается вдоль своей оси качания, перпендикулярной оси вращения кулачка. В каждый момент времени кулачок касается обеих направляющих (каждой в одной точке) за счет выбора формы кулачка (в первом варианте) или направляющих (во втором варианте). В первом варианте (см. рис. 1) направляющие имеют форму цилиндров, а во втором варианте (см. рис. 2) кулачок выполнен в форме цилиндра.
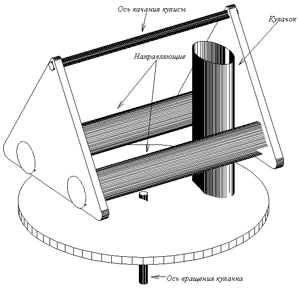
Рис. 1.
Для нахождения функции, описывающей форму кулачка для первого варианта, необходимо решить дифференциальное уравнение (1.1).
 (1.1)
(1.1)
при , где
, где
 — максимальный угол отклонения кулисного механизма с направляющими вокруг оси качания кулисы;
— максимальный угол отклонения кулисного механизма с направляющими вокруг оси качания кулисы;
l
— расстояние между осями направляющих кулисного механизма;
r
— радиус направляющей:
H
— радиус качания кулисы (перпендикуляр от центра оси качания кулисы к отрезку, соединяющему центры направляющих);
L
— радиус вращения кулачка (между центром кулачка и центром оси вращения кулачка).
Оси x
и y
лежат в плоскости определяющей
кулачка и направлены соответственно вдоль максимального и минимального диаметров.
Уравнение (1.1) имеет вид дифференциального уравнения Клеро. Как известно, дифференциальное уравнение Клеро  /1/ имеет особый интеграл (в параметрической форме)
/1/ имеет особый интеграл (в параметрической форме)  и
и , причем
, причем . Правая часть дифференциального уравнения (1.1) — это
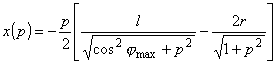
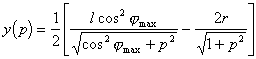
. Правая часть дифференциального уравнения (1.1) — это . после подстановки имеем параметрическое решение уравнения (1.1) в виде:
. после подстановки имеем параметрическое решение уравнения (1.1) в виде:
Для нахождения функции, описывающей форму направляющих для второго варианта (рис. 2), необходимо решить систему из 3-х уравнений (2.1), (2.2) и (2.3), приведенных ниже. Уравнение (2.1) определяет, что каждая точка направляющей лежит на окружности — кулачке. Дифференциальное уравнение (2.2) определяет, что в точках соприкосновения кулачка и направляющих совпадают производные, т.е. происходит касание. Уравнение (2.3) (следует из) определяет, что конструкция жестко связана.
 (2.1)
(2.1) (2.2)
(2.2) (2.3)
(2.3)
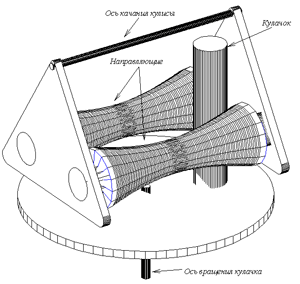
Рис. 2.
при очевидных граничных условиях
 и
и  , где
, где
— максимальный угол отклонения кулисного механизма с направляющими вокруг оси качания кулисы;
 — угол отклонения кулисного механизма с направляющими вокруг оси качания кулисы;
— угол отклонения кулисного механизма с направляющими вокруг оси качания кулисы;
 — угол поворота кулачка вокруг оси собственного вращения при отклонении кулисы на угол;
— угол поворота кулачка вокруг оси собственного вращения при отклонении кулисы на угол;
l
— расстояние между осями направляющих кулисного механизма;
R
— радиус кулачка;
H
— радиус качания кулисы (перпендикуляр от центра оси качания кулисы к отрезку, соединяющему центры направляющих);
L
— радиус вращения кулачка (между центром кулачка и центром оси вращения кулачка).
Ось x
направлена вдоль центральной оси направляющей, ось y
— перпендикулярно к оси x
. Начало координат — середина направляющей, самое ?узкое¦ место. Координата y
определяет радиус сечения направляющей в точке с координатой x
. Продифференцируем (2.1) по x
:

 (2.4)из (2.2)
(2.4)из (2.2) , подставим в (2.4)
, подставим в (2.4)
 , отсюда следует
, отсюда следует
 , и имеем
, и имеем
 (2.5)
(2.5)
из (2.3) следует, что или
или  , — подставляем в (2.5)
, — подставляем в (2.5)
 , что дает
, что дает
 (2.6)
(2.6)
Подставим из (2.3) выражение для в (2.6)
в (2.6)
 или
или , откуда имеем
, откуда имеем
 (2.7)
(2.7)
Подставив (2.7) в (2.2), получим или
или
 или
или
 (2.8)
(2.8)
Подставив из (2.8) выражение для  в (2.7), получим
в (2.7), получим
 (2.9)
(2.9)
Подставим (2.8) и (2.9) в (2.1), получим выражение:
 ,
,
в котором приведем к общему знаменателю выражения в скобках 
и затем сократим выражения в скобках ,
,
что приведет к окончательному виду дифференциального уравнения, определяющего форму направляющих
 (2.10)
(2.10)
Если обозначить и
и  , то уравнение (2.10) можно переписать как
, то уравнение (2.10) можно переписать как
 (2.11)
(2.11)
 (2.12)
(2.12)
Как известно, дифференциальное уравнение Лагранжа 
приводится к уравнению в виде  ;
;
переписав последнее относительно в виде
в виде  (2.13)
(2.13)
и получаем линейное дифференциальное уравнение относительно.
Для уравнения (2.12) можно записать соотношения
 ,
,  ,
,  ,
,  .
.
Обозначим  и запишем уравнение (2.13) как линейное дифференциальное уравнение относительно
и запишем уравнение (2.13) как линейное дифференциальное уравнение относительно .
.
 (2.14)
(2.14)
Обозначим  и перепишем уравнение (2.14) как линейное дифференциальное уравнение первого порядка
и перепишем уравнение (2.14) как линейное дифференциальное уравнение первого порядка ,
,
или, после упрощения (2.15)
(2.15)
Как известно, линейное дифференциальное уравнение первого порядка 
при интегральном множителе  имеет общее решение
имеет общее решение .
.
Для уравнения (2.15) можно записать
 ,
,  .
.
Из /2/ имеем:
 ,
,
отсюда .
.

Общее решение можно теперь записать как .
.
Если рассматривать z
как параметр, то подставив x
в уравнение (2.12), можно получить параметрическое решение уравнений (2.1), (2.2) и (2.3) в виде
,
 . (2.16)
. (2.16)
чтобы определить неизвестную константу C, необходимо удовлетворить граничные условия. очевидно, что условие
выполняется тождественно. Уравнение (2.16) для условия
примет вид:
 ,
,
откуда .
.
Окончательно имеем параметрическое задание  в виде
в виде ,
,  , причем
, причем 
 ,
,
 , где и .
, где и .
Оба варианта определения геометрических форм деталей предложенной конструкции кулисно-рычажного механизма были предварительно промоделированы в программе трехмерного проектирования AutoCAD версии 12. изготовленные пробные экземпляры показали ожидаемый результат.
Данная конструкция обладает способностью сохранять форму передачи движения при любом изменении положения самой конструкции за счет постоянного касания кулачка с каждой направляющей в одной точке. При этом не требуется использования дополнительных деталей, например подшипников, что позволяет без проблем изготовить подобные кулисно-рычажные механизмы малых размеров. Это дало возможность использования описанного механизма, в частности, в серийном производстве датчиков для медицинских приборов, осуществляющих сканирование внутренних органов человека, на Арзамасском приборостроительном заводе. Возможно применение и в других областях приборостроения и промышленности.
Первый вариант более труден для изготовления (т.к. форма кулачка является сложной геометрической фигурой, для изготовления которой необходима специальная оснастка), поэтому наибольший практический интерес представляет второй вариант реализации (и поэтому изложенный более подробно), где направляющие являются фигурами вращения и могут быть легко изготовлены на станке с ЧПУ. Следует отметить, что для второго варианта необходимо просчитать в диапазоне  (можно с небольшим запасом), т.к. только в этом интервале происходит касание.
(можно с небольшим запасом), т.к. только в этом интервале происходит касание.
На описанное устройство получено решение о выдаче патента Всероссийским Научно-исследовательским институтом государственной Патентной Экспертизы (ВНИИГПЭ).
Литература:
1. Корн Г. К. и Корн Т. К., Справочник по математике (для научных работников и инженеров),стр. 269, М.: ?Наука¦, 1974.
2. Бронштейн И. Н. и Семендяев К. А., Справочник по математике для инженеров и учащихся втузов, стр. 93, М.: ?Наука¦, 1986.