

Учебная работа. Реферат: Упругий и неупругий удар двух однородных шаров
упругий и неупругий удар двух однородных шаров
1. Введение
Столкновения движущихся тел присущи всем уровням Мироздания – от микроскопического до космического, поэтому ударные явления весьма многообразны. В динамике изучают влияние соударений на движение механических систем. Эта задача привлекала внимание многих известных ученых, включая Х. Гюйгенса, И. Ньютона, Ж. Даламбера, С. Пуансона, Г. Дарбу, Э. Дж. Рауса, А.М. Ляпунова, Н.Е. Жуковского, С.П. Тимошенко и многих других. Специфика ударов состоит в их интенсивности и скоротечности. Данное свойство может оказаться и полезным, как при забивке свай, добыче руды или игре в мяч, и опасным, как при транспортных происшествиях. следовательно, проблема удара важна не только для теоретиков, но и для конструкторов, автолюбителей, спортсменов и др.
2. Подходы в теории удара
С физической точки зрения ударные силы – отклик на деформации, возникающие вблизи площадки контакта и волнообразно распространяющиеся в данных телах. Математические модели отражают этот процесс с большей или меньшей полнотой. В классической теории удара деформации не учитываются и проблема сводится к определению интегральных характеристик ударных сил – их импульсов. В основе этой теории лежат законы механики и некоторые дополнительные гипотезы.
Рассмотрим для примера простейшую задачу о прямом ударе двух шаров с массами m1
и m2
.
v1
—
v2
—
На рисунке шары массой m1
и m2
.
до соударения имеют
скорости v
1
—
и v
2
—
требуется найти их скорости после удара.




Закон сохранения импульса выражается формулой:
m1
v1i
+ m2
v2i
= m1
v1
+ m2
v2
где v1i
и v2i
; v1
и v2
соответствуют до – и послеударным значениям скоростей. Этого единственного уравнения недостаточно для определения двух неизвестных v
1
и v
2
. Чтобы построить единственное решение, можно принять одну из следующих гипотез: суммарная кинетическая энергия при ударе сохраняется (абсолютно упругий удар), шары после удара не разделяются, т.е. v
1
= v
2
(абсолютно неупругий удар). Можно выбрать более общую гипотезу Ньютона, согласно которой
v
2
—
v
1
=
e
(
v1i
—
v2i
)
Коэффициент восстановления e
, как экспериментально установил Ньютон, зависит от материала шаров и лежит в пределах от нуля до единицы.
Волновая теория удара, восходящая к Б. Сен – Венану, наиболее полно описывает напряженное состояние соударяемых тел. В ее основе лежит довольно сложные уравнения математической физики, допускающие точное решение лишь в исключительных случаях. В общем случае использование волновой теории нецелесообразно, в частности, с ее помощью не удается решить рассмотренную задачу об ударе шаров.
Компромиссом между этими двумя крайними подходами служат модели, частично учитывающие деформации. Идею таких методов предложил Даламбер, который мысленно помещал маленькую пружинку (деформируемый элемент) в точку ударного контакта. С математической точки зрения проблема удара сводится к решению обыкновенных дифференциальных уравнений, что не представляет принципиальных трудностей. В вышеприведенном примере идеальная пружинка не рассеивает энергию, поэтому удар будет абсолютно упругим.
3. Упругое соударение тел
При упругом соударении тел тела претерпевают упругую деформацию. При этом кинетическая энергия движущихся тел частично или полностью переходит в потенциальную энергию упругой деформации и во внутреннюю энергию тел. Взаимодействующие тела представляют собой замкнутую систему, если на них не действуют силы со стороны других тел. В замкнутых системах выполняются законы сохранения энергии и импульса. Зная движение тел до столкновения и применяя законы сохранения, можно определить движение тел после столкновения. Но при этом мы ничего не узнаем о том, как происходит само столкновение. Для решения же ряда задач о столкновении микрочастиц, как правило, достаточно знать об их движении после взаимодействия. «Моделью» для задач подобного рода служит задача о столкновении шаров. Если шары катаются по гладкой горизонтальной поверхности, и если силой трения качения можно пренебречь, то систему из двух шаров можно считать замкнутой. Существует два предельных вида удара: абсолютно неупругий и абсолютно упругий.
Столкновение (соударение) — это кратковременное взаимодействие, при котором тела непосредственно касаются друг друга.
Анализ явлений, имеющий место при ударе упругих сплошных тел, довольно сложен, поэтому рассмотрим самый простой случай — центральное соударение двух однородных шаров. Соударение называется центральным, если векторы скорости шаров до удара направлены по прямой, проходящей через их центры.
абсолютно упругие и неупругие столкновения — это идеальные случаи. На практике они могут быть реализованы лишь с определенной степенью приближения. В произвольном случае соударения шаров справедливы законы сохранения импульса и энергии:
Абсолютно упругим называется такой удар, после которого во взаимодействующих телах не остается никаких деформаций и суммарная кинетическая энергия, которой обладали тела до удара, равна кинетической энергии тел после удара. Чтобы удар был абсолютно упругим, взаимодействующие тела должны обладать определенными свойствами. А именно, силы, возникающие при ударе, должны зависеть от величины деформации и не зависеть от ее скорости. наиболее близкими к этим свойствами обладают хорошие сорта стали, слоновая кость. Соударение таких тел происходит следующим образом. При ударе возникают деформации соударяющихся тел, а значит и силы, сообщающие ускорения обоим телам, в противоположных направлениях. В какой то момент времени скорости шаров становятся равными, деформации достигают максимального значения, силы продолжают действовать, изменяя скорости в тех же направлениях, что и раньше. Поэтому шары будут «отодвигаться» друг от друга, а деформации уменьшаться пока совсем не исчезнут. К этому моменту времени упругие силы, возникающие в телах, совершат такую же работу, какая была затрачена на деформацию. В результате вся кинетическая энергия, которой обладали тела до удара, снова перейдет в кинетическую энергию тела после удара. Для определения скорости тел после упругого взаимодействия рассмотрим удар двух шаров (материальных точек), образующих замкнутую систему.
3.1. Центральное упругое столкновение тел
Имеются два сферических объекта (шарика) с массами m1
и m2
. предположим, что эти шарики движутся без вращения по одной оси и испытывают центральное упругое соударение. В этом случае закон сохранения импульса запишется в виде:
m1
v1i
+ m2
v2i
= m1
v1
+ m2
v2
где v1i
и v2i
— начальные скорости каждого объекта, а v1
и v2
— их конечные скорости. закон
m1
v1i
2
/ 2 + m2
v2i
2
/ 2 = m1
v1
2
/ 2 + m2
v2
2
/ 2
Векторы скоростей шаров после упругого удара будут лежать на линии центров шаров, потому что силы взаимодействия во время удара вследствие симметрии будут направлены по этой же прямой.
Закон сохранения импульса может быть преобразован следующим образом:
m1
(v1i
— v1
) = m2
(v2
— v2i
)
Также преобразуем выражение для закона сохранения энергии
m1
(v1i
2
— v1
2
) = m2
(v2
2
— v2i
2
)
Если разница между начальной и конечной скоростями не равна нулю (то есть столкновение действительно произошло), мы можем разделить второе из двух последних уравнений на первое, что дает:
v1i
+ v1
= v2
+ v2i
или
v1i
— v2i
= v2
— v1
Другими словами, в одномерном случае упругих столкновений относительная скорость движения объектов после столкновения равняется относительной скорости движения до столкновения.
чтобы получить конечные скорости движения объектов через их начальные скорости и массы, нужно выразить v2
из последнего уравнения и подставить его в уравнение для закона сохранения импульса. окончательно получаем:
v1
= v1i
(m1
— m2
) / (m1
+ m2
) + v2i
(2 m2
) / (m1
+ m2
)
таким же способом находим выражение для v2
v2
= v1i
(2 m1
) / (m1
+ m2
) + v2i
(m2
— m1
) / (m2
+ m1
)
далее предположим, что сталкиваются объекты с одинаковой массой, т.е. m1
= m2
= m. В этом случае:
v1
= v1i
(m — m) / (m + m) + v2i
(2 m) / (m + m)
v2
= v1i
(2 m) / (m + m) + v2i
(m — m) / (m + m)
окончательно получаем, что
v1
= v2i
и v2
= v1i
Это означает, что в случае центрального упругого соударения объектов с равными массами, они будут просто обмениваться скоростями. Если один из объектов до столкновения покоился, то после столкновения он остановится, а второй объект начнёт движение. При этом скорость движения второго объекта будет равна скорости первого объекта до столкновения.
В общем случае центрального и абсолютно упругого столкновения объектов с разными массами, один из которых до столкновения покоился (v2i
=0), можно записать следующие выражения для скоростей после удара:
v1
= v1i
(m1
— m2
) / (m1
+ m2
)
v2
= v1i
(2 m1
) / (m1
+ m2
)
Если масса налетающего шара m1
больше массы покоящегося шара m2
, то v1
и v2
будут положительными и оба шара после столкновения будут двигаться в одном направлении, совпадающем с направлением начального движения налетающего шара.
Если же масса налетающего шара m1
меньше массы покоящегося шара m2
, то v1
будет отрицательной, а v2
— положительной, и шары после столкновения будут разлетаться в противоположных направлениях. При этом, т.к. 2 m1
> m1
— m2
, то маленький шарик отразиться с большей скоростью.
Такова картина удара двух любых тел, если начальная скорость направлена вдоль линии, соединяющей центры масс этих тел, и если силы взаимодействия направлены вдоль этой же линии центров. В противном случае удар будет представлять сложное явление.
При нецентральном ударе шаров картина соударения будет иная.
3.2. Нецентральное упругое столкновение тел
Здесь во время удара имеет место как приближение центров шаров друг к другу вследствие их деформации, так и скольжение поверхности одного шара по поверхности другого. очевидно, что вследствие скольжения поверхностей возникнут силы трения, которые вместе с упругими силами взаимодействия определят изменение скорости шаров после удара. Кроме того, силы трения вызовут вращение шаров относительно их центров масс.
Для того чтобы представить механизм удара, разложим векторы скоростей обоих шаров до удара на направление линии центров шаров и на направление перпендикулярное к этой линии.
V1
ц


 V1i
V1i
F’
Т
 V1
V1
п
F’y
Fy



V2i
v2
п
F
T

V2
ц
В следствии «скольжения» поверхности шаров возникнут силы трения F’T
и FT
, которые вместе с упругими силами взаимодействия F’y
и Fy
определят изменение скорости шаров после удара. Кроме того, силы трения вызовут вращение шаров вокруг центра. только в том случае, когда силы трения FT
очень малы по сравнению с упругими силами Fy
, т.е. FT
<< Fy
, можно пренебречь действием сил трения.
В этом случае задача о нецентральном столкновении шаров решается достаточно просто. Действительно, соединяя центры масс сталкивающихся шаров прямой и разложив скорость каждого шара на нормальную составляющую, направленную вдоль линии центров, и тангенциальную составляющую, перпендикулярную к ней. Так как согласно нашему предположению силы трения отсутствуют, то тангенциальные силы во время столкновения не возникают и, следовательно, тангенциальные скорости шаров изменяться не будут. нормальные же составляющие скорости после удара можно определить на основании закона сохранения количества движения и закона сохранения энергии таким же путем, как и при центральном ударе.
Запишем уравнения:
m1
v1
ц
+ m2
v2
ц
= m1
ц
v’
1
ц
+ m2
v’2
ц
m1
( v2
1
п
+
v2
1
ц
) + m2
(v2
2
п
+ v2
2
ц
)
=
m1
( v’2
1
п
+
v2
1
ц
) + m2
(v’2
2
п
+ v2
2
ц
здесь неизвестны только две величины: v’1
ц
и v’2
ц
.
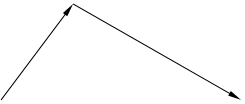
Общие закономерности нецентрального удара шаров в этом случае можно найти следующим путем. Предположим, что до удара шар 2 покоится, а шар 1 движется. Сила взаимодействия в момент удара проходит через центры шаров (нет трения), и ее направление зависит от «прицельного» расстояния δ
,
равного расстоянию центра покоящегося шара от линии полета центра другого шара (до удара). Плоскость чертежа совпадает с плоскостью, проходящей через центры шаров и вектор скорости шара 1.
F


 2
2
r2
δ


 r1
r1

Р
1

F’
Удар произойдет при условии δ
< r1 + r2
,
где r1
и r2
– радиусы шаров. Угол θ
зависит от δ
и r1 + r2
.
Составляющая количества движения шара 1 (ударяющего), нормальная к F (
сила взаимодействия)
, остается неизменной. Составляющие количеств движения шаров по направлению силы F
изменяются в соответствии с законами центрального удара.
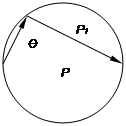
По закону постоянства количества движения:
P = P1
+ P2
где P
– количество движения шара 1 до удара, P1
и P2
– количества движения шаров 1 и 2 после удара соответственно.
P2
P1
 θ
θ

P
Закон сохранения энергии можно записать так:
P2
/m1
= P2
1
/m1
+ P2
2
/m2
Так как P = m v
и mv2
= P2
/ m
для любого тела.
Вектор P2
составляет угол θ
с вектором P
, покоившийся шар отскочит под углом θ
к начальной скорости первого шара, тогда из треугольника векторов следует:
P2
1
= P2
2
+ P2
— 2 P P2
cos θ
учитывая постоянство энергии, исключаем P
1
и получаем
P2
= 2 m2
P cos θ /
(
m1
+ m2
)
= β P cos θ
β = 2 m2
/ (m1
+ m2
)
Отсюда видно, что общее соотношение между Р2
и Р
зависит от угла θ
и соотношения масс m1
/m2
.
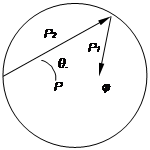
Следует различать два случая: m1
> m2
и m1
< m2
. В первом случае β
<
1
, тяжелый шар ударяет легкий. Конец вектора Р2
описывает окружность диаметром βР
. Оба шара после удара летят в сторону начального движения первого шара. Величина угла θ
изменяется от 0 до π
/2
. Угол отклонения первого шара может изменяться от 0 до некоторого φмакс.
. Одному значению φ
соответствуют два значения θ.
 β
β
<
1
Р2
Р1




 А
А
В Р
φ
βР

Точка В представляет центральный удар, оба шара летят после удара по одному направлению. Точка А представляет промах (шары не задели друг друга).
Во втором случае, при m1
< m2
, легкий шар ударяет тяжелый. Здесь β
>
1
и шар 1 после удара может лететь назад. Угол отклонения налетающего шара φ
изменяется от 0 до π
.




 А В
А В
βР

Точка В представляет центральный удар. каждому значению φ
соответствует только одно значение θ.
При одинаковых массах шаров m1
= m2
картина возможных количеств движения показана на рисунке.
Р2




 А В
А В
φ
Угол φ
изменяется от 0 до π
/2
. При центральном ударе шар 1 останавливается, а шар 2 с той же скоростью движется далее (точка В). Угол разлета шаров θ + φ
всегда равен π
/2
.
Угол θ
нетрудно связать с прицельным расстоянием δ
и показать, что
(
r1
+ r2
)
sin
θ
=
δ
Зная δ
, диаметры шаров и их массы, найдем θ
и β
, по данным Р
определим Р2
и Р1
, которые в свою очередь определяют скорости и направления шаров после удара.
4. Неупругое соударение тел
Абсолютно неупругим называют такой удар, после которого скорости обоих соударяющихся тел оказываются одинаковыми. Чтобы это стало возможным, соударяющиеся тела должны обладать такими свойствами, что силы, возникающие при их деформации, зависят не от величины деформации, а от скорости изменения деформации. Такие свойства присущи, например, мягкой глине, пластилину. При неупругом соударении происходит следующее. В начальный момент удара скорость деформации велика (шары сжимаются), поэтому возникают значительные силы, сообщающие обоим шарам ускорения, направленные в противоположные стороны. По мере развития удара скорости деформации шаров уменьшаются, а сами деформации увеличиваются до тех пор, пока скорости шаров не окажутся равными. В этот момент деформации шаров перестанут изменяться, исчезнут силы, и оба шара будут двигаться с одинаковой скоростью. При абсолютно неупругом ударе выполняются законы сохранения импульса и полной энергии. Механическая же энергия тел до удара больше механической энергии после удара, так как она частично (или полностью) переходит во внутреннюю энергию тел и расходуется на работу по деформации тел. Для определения скорости тел после взаимодействия рассмотрим удар двух шаров (материальных точек), образующих замкнутую систему. Массы шаров m1
и m2
,
скорости до удара V1
i
и V2
i
. Согласно закону сохранения суммарный импульс шаров до удара должен быть таким же, как после удара:
m1
V
1i
+
m
2
V
2i
=
(m
1
+
m
2
)
U
где U — скорость после удара, одинаковая для обоих шаров. Из уравнения следует, что:
U = ( m1
V
1i
+
m
2
V
2i
)
/
(m
1
+
m
2
)
законследующий вид:
m
1
V1
i
2
/ 2 +
m
2
V
2i
2
/ 2 =
(m
1
+
m
2
)
U
2
+ W
где W — изменение внутренней энергии системы.
Кинетическая энергия тел до удара имеет следующую величину:
W1
= m
1
V1
i
2
/ 2 +
m
2
V
2i
2
/ 2
А кинетическая энергия после удара:
W2
=
(m
1
+
m
2
)
U
2
/2 = ( m1
V
1i
+
m
2
V
2i
)2
/
2
(m
1
+
m
2
)
потери механической энергии, или часть энергии, которая перешла в тепловую форму составляет:
W = W1
— W2
= m1
m2
(V1i
– V2i
)2
/ 2 (
m
1
+
m
2
)
Величина V1i
– V2i
представляет относительную скорость движения тел до удара. поэтому энергия, перешедшая в тепло, зависит от соотношения масс соударяющихся тел m1
m2
/(
m
1
+
m
2
)
и относительной скорости движения их до удара.
Энергию потерь можно рассматривать как кинетическую энергию некоторой эффективной массы:
m0
= m1
m2
/ (
m
1
+
m
2
)
движущихся с относительной скоростью V‘i
=V1i
– V2i
.
Для конкретных расчетов скорости нужно спроектировать соотношение импульсов на выбранные направления. Если до удара скорости шаров направлены вдоль прямой, проходящей через их центры, удар называют центральным. Скорость шаров после такого удара будет направлена по той же прямой. Поэтому уравнение сохранения импульсов можно рассматривать как скалярное. Но скорости при этом надо считать совпадающими по знаку, когда они направлены в одну сторону и противоположными по знаку, когда они направлены в противоположные стороны. Рассмотрим некоторые частные случаи.
1. Шары движутся в одном направлении. Удар возможен, если скорости V1
i
и V
2i
различны. Например, V
2i
>
V
1i
, т.е. второй шар догоняет первый. После удара шары будут двигаться в ту же сторону со скоростью большей, чем скорость первого шара и меньшей, чем скорость второго. Если при этом массы шаров одинаковы, то
U =( V1i
+ V2i
) / 2
2. Шары движутся навстречу друг другу. После удара шары будут двигаться вместе в ту сторону, в которую двигался шар, обладающий большим импульсом. Если импульсы обоих шаров равны по величине, то после удара оба шара остановятся.
3. В случае нецентрального удара (рис.3.6.2а) скорости V
1i
и V
2i
можно разложить на составляющие V
1X
и V
2X
в направлении линии, соединяющей центры шаров (ось Х), и состaвляющие V
1Y
и V
2Y
в перпендикулярном направлении (ось У). Для составляющих V
1X
,
V
2X
и V
1Y
,V
2Y
записать законопределить составляющую результирующей скорости.
Рассмотрим неупругий удар более подробно. При неупругом ударе часть кинетической энергии налетающего шара теряется с выделением тепла. В предельном случае абсолютно неупругого удара налетающее тело слепляется с покоящимся телом, кинетическая энергия их относительного движения обращается в ноль и они продолжают движение, как единое тело. В большинстве практических случаев мы имеем дело с частично упругим ударом, когда в теле после столкновения возбуждаются деформационные колебания, затухающие со временем. Возбуждение таких колебаний можно смоделировать при помощи двух одинаковых шариков, соединённых пружиной. Предположим, что абсолютно упругий шар сталкивается с пружинным осциллятором. Массы шаров одинаковы и равны m
. Так как в момент удара пружина ещё не действует, налетающий шар останавливается, а левый шар осциллятора приводится в движение со скоростью налетающего шара v. При этом центр масс осциллятора движется со скоростью v/2. Со временем колебания осциллятора затухнут и он будет продолжать поступательное движение со скоростью v/2, а суммарная энергия всей системы составит лишь половину от энергии налетающего шара. другая половина выделится в виде тепла в осцилляторе.
Удар обычных неупругих тел соответствует промежуточному случаю между идеально упругим и полностью неупругим ударами. Ему аналогичен удар аналогичен удар двух шаров через неупругую пружину, которая сжимаясь за первую половину времени удара до некоторой величины, не примет своих первоначальных размеров после удара; или расталкивающая сила во время сжатия будет больше, чем во вторую половину времени удара при расширении пружины. часть потенциальной энергии сжатия пружины перейдет в тепло и не будет обращена в кинетическую энергию движения. следовательно, закон сохранения механической энергии в этом случае нельзя применять. Условие равенства скоростей после удара также не будет иметь места, как это было при полностью неупругом ударе, так как после удара оба тела движутся с различными скоростями.
Неупругий удар можно характеризовать той долей энергии деформации, которая обращается в тепло за время удара. Но еще Ньютоном было найдено, что при неупругом ударе шаров из определенного материала величины относительных скоростей до и после удара находятся в постоянном отношении, и такой удар характеризуется коэффициентом восстановления относительной скорости после удара
:
е =
|V2
– V1
| / |V2i
– V1i
|
где V2i
– V1i
– относительная скорость до удара, а V2
– V1
– после удара. Опыт показывает, что с некоторой степенью точности можно считать величину е
постоянной и зависящей только от материала соударяющихся шаров.
При идеально упругом ударе относительная скорость остается той же самой по величине, но меняет свой знак:
V1i
– V2i
= — (V1
– V2
)
Коэффициент восстановления всегда меньше единицы, ибо при упругом ударе он равен единице, при полностью неупругом ударе равен нулю, так как в этом случае
V2
– V1
= 0
Зная коэффициент е
, можно подсчитать скорости движения шаров после удара и потери энергии.
Используемая литература
:
1. Д.В.Сивухин, «Общий курс физики. Механика», Наука, 1979
2. О.Д.Шебалин, «Физические основы механики и акустики», Высш. школа, 1981
3. С.П.Стрелков, «Механика», Наука, 1975
4. К.Шварц, Т.Гольдфарб, «Поиски закономерностей в физическом мире», пер. с англ., Москва, мир, 1977
5. Лабораторные занятия по физике, под ред. Л.Л.Гольдина, Москва, Наука, 1983
6. А.И. Иванов, «Закономерности удара в механических системах», Природа, 1999, №10