

Учебная работа. Реферат: Синтез адаптивной системы автоматического управления
I
. Синтез управляющих устройств
Начальные данные
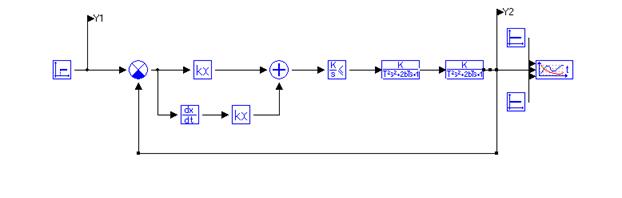
На рисунке приведена структурная схема поочередного соединения исполнительного механизма и объекта управления.

В качестве исполнительного механизма употребляется механизм неизменной скорости с ограничением:
объект управления описывается передаточными функциями вида:
Численные значения характеристик исполнительного механизма и объекта управления:
Вариант
kим
k1
k2
T1
T2
x1
x2
11
0,20
1,00
1,00
1,80
3,80
0,80
0,80
Задание:
Провести анализ динамических параметров объекта управления с внедрением графиков переходного процесса и АЧХ. При определении продолжительности переходного процесса принять D = ±5% от установившегося значения выходной переменной.
Для моделирования системы управления используем программку МВТУ (моделирование в технических устройствах).
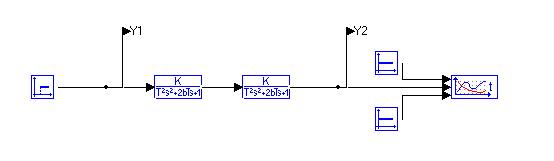
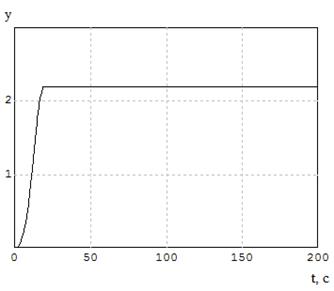
Рис.1 – объект управления
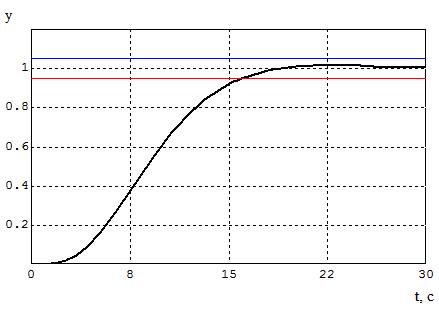
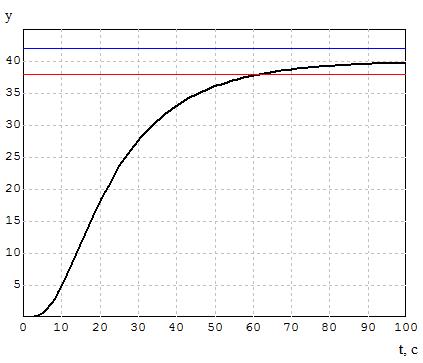
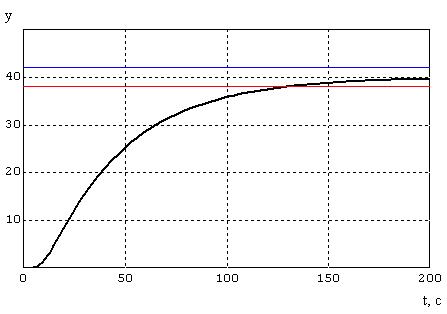
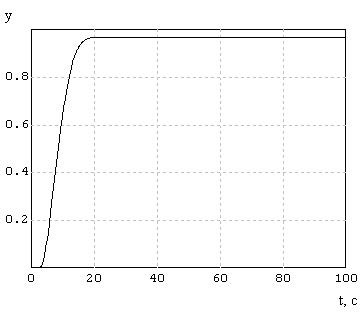
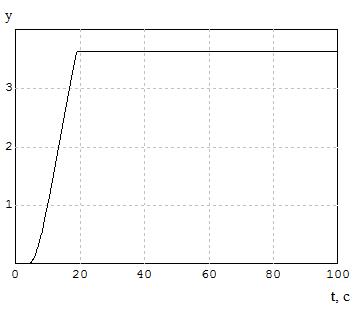
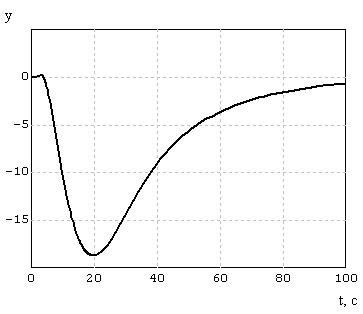
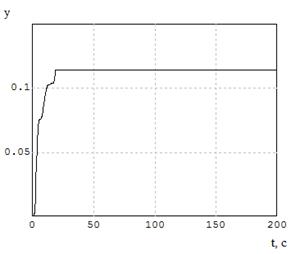
Рис.2 – График переходного процесса
По графику видно, что система является устойчивой с плавным переходным действием без перерегулирования. Установившееся
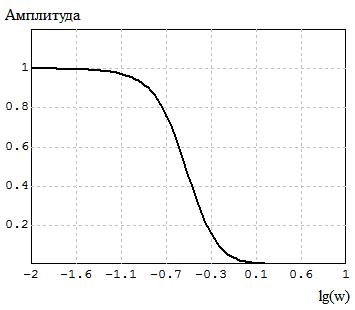
Рис.3 – График АЧХ
АЧХ указывает, во сколько раз амплитуда сигнала на выходе системы различается от амплитуды входного сигнала на всём спектре.
max
= A0
= 1;
: A = 0.01
c
= 0,0551;
: A = 0.707 ωп
= 0,6316.
2 РАЗРАБОТКА ЛИНЕЙНОГО РЕГУЛЯТОРА
характеристики ступенчатого входного действия:
1) время «включения» скачка t = 0;
2)
3)
На рисунке 2.1 изображена схема поочередно соединённых исполнительного механизма и объекта управления, на которые подаётся ступенчатое входное действие.
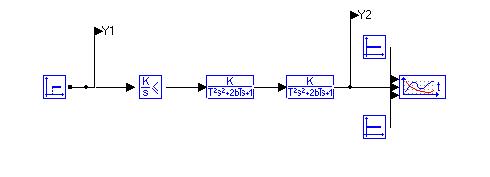
Набросок 2.1 — Схема поочередно соединённых исполнительного механизма и объекта управления.
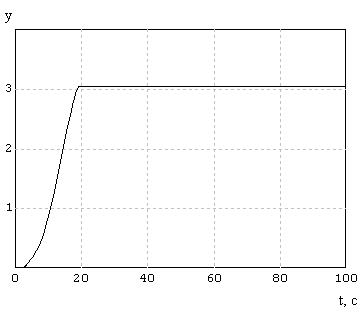
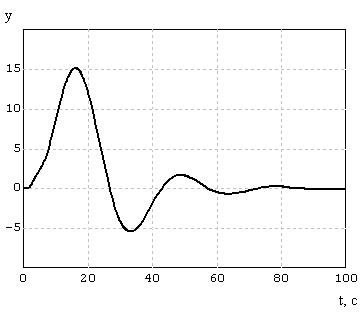
График переходного процесса, протекающего в системе управления, изображён на рисунке 2.2.
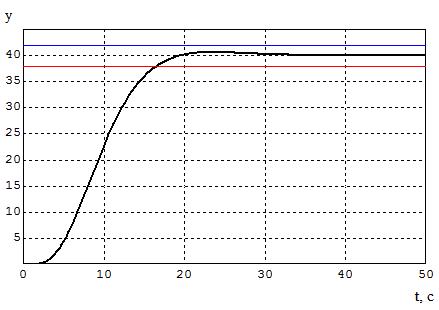
Набросок 2.2 – Переходной процесс
В данной схеме 2.1 исполнительный механизм представляет собой интегратор с ограничениями. Потому при выбирании регулятора нужно учесть, что интегральная составляющая в схеме уже находится.
Существует два вида регуляторов без интегральной составляющей: П-регулятор и ПД-регулятор. Добавка П-регулятора в систему управления делает её высокоточной в установившемся режиме, но в переходном режиме свойство системы усугубляется. Передаточная функция П-регулятора:
 .
.
Её соединение с передаточной функцией исполнительного механизма даст:
 .
.
соединение пропорциональной и интегральной составляющих прирастит точность системы управления.
ПД-регулятор улучшает свойство системы в переходном режиме, на свойство системы в установившемся режиме влияет слабо. Передаточная функция ПД-регулятора:
 .
.
Её соединение с передаточной функцией исполнительного механизма даст:
 .
.
соединение пропорциональной и интегральной составляющих прирастит точность системы управления, а соединение дифференциальной и интегральной составляющих прирастит быстродействие системы.
Нужно получить резвый переходной процесс без перерегулирования, как следует, более пригодным для этого является ПД-регулятор. Схема линейного регулятора в системе управления изображена на рисунке 2.3.
Набросок 2.3 – Схема с линейным регулятором
3 РАСЧЕТ ПАРАМЕТРОВ РЕГУЛЯТОРА
Для определения численных значений характеристик линейного регулятора воспользуемся способом Циглера –Никольса.
Регулятор управляет объектом с таковой передаточной функцией:

Передаточная функция разомкнутой системы:
Дальше используем аспект Найквиста:


Нужно довести систему до границы стойкости






Исходя из передаточной функции ПД-регулятора для данного проектирования, Wр
(S)=kp
(1+ ), характеристики регулятора
), характеристики регулятора


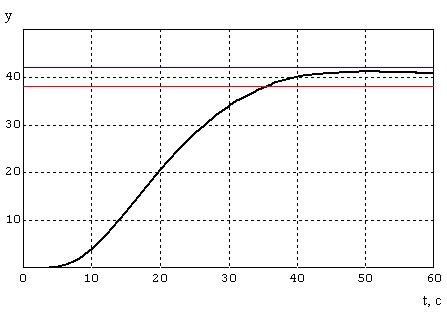
При отысканных параметрах получаем переходной процесс без перерегулирования, изображенный на рис. 3.2. время переходного процесса – 62с.
Набросок 3.2 – График переходного процесса при избранных параметрах базисного регулятора.
4 анализ ДИНАМИЧЕСКИХ СВОЙСТВ САУ
Проведём анализ динамических параметров САУ, синтезированной в первой части расчетной работы, при
2
= 0,4. График переходного процесса изображен на рисунке 4.1.
Набросок 4.1 – График переходного процесса
процесс проходит плавненько, без перерегулирования, время переходного процесса t = 129 c.
Проведём анализ динамических параметров САУ, синтезированной в первой части расчетной работы, при
2
= 1,6. График переходного процесса изображен на рисунке 4.2.
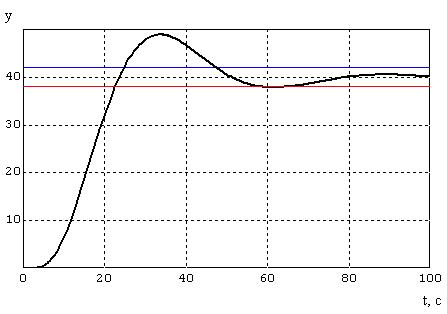
Набросок 4.2 – График переходного процесса
процесс колебательный, с перерегулированием. Время переходного процесса t = 23 c.
Перерегулирование σ =  = 22,2225%.
= 22,2225%.
Проведем анализ САУ при случайном изменении коэффициента усиления
1
(при
2
= 1,0) в виде обычного шума с математическим ожиданием, равным
k
= 1,0, и дисперсией, равной
k
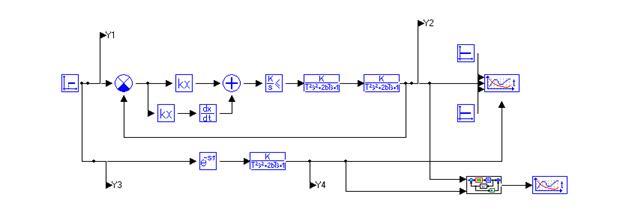
= 0,2. Схема модели представлена на рисунке 4.3.
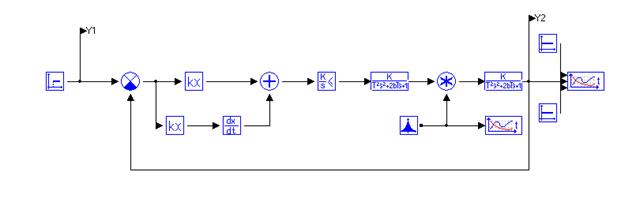
Набросок 4.3 – Схема модели с внедрением блока «Обычный шум»
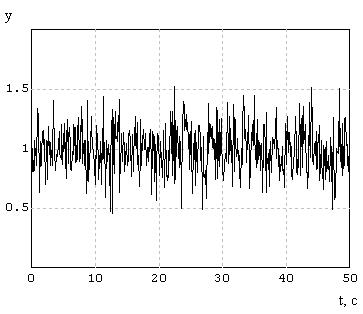
Набросок 4.4 – График обычного шума
График переходного процесса изображен на рисунке 4.4. время переходного процесса t = 35 c.
Набросок 4.4 – График переходного процесса.
5 ФОРМИРОВАНИЕ ЭТАЛОННОЙ МОДЕЛИ САУ
В качестве эталонной модели возьмем апериодическое звено 2-го порядка с передаточной функцией
 .
.
k=1 – увеличивает либо уменьшает сигнал;
T=5.5 – влияет на скорость переходного процесса;
 =0.75.
=0.75.
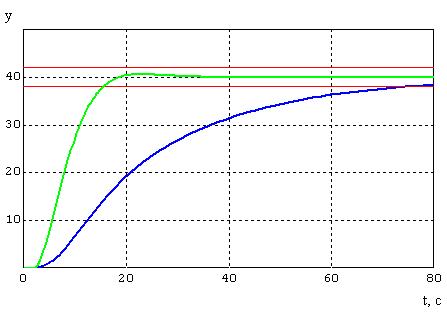
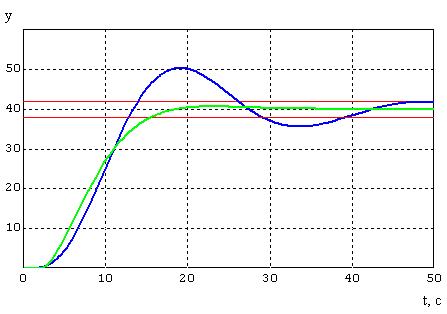
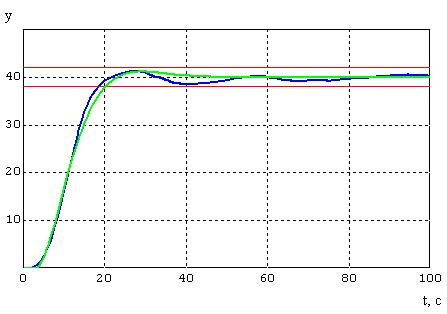
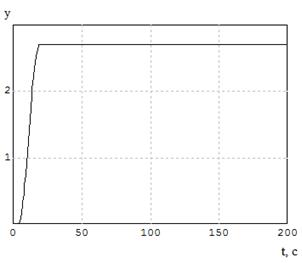
Схема с эталонной моделью представлена на рисунке 5.1. На рисунке 5.2 изображены переходные процессы моделей. время переходного процесса эталонной модели t = 20.2c.
Набросок 5.1 – Схема эталонной и настоящей моделей.
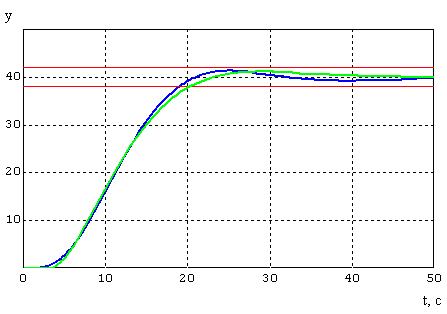
Набросок 5.2 – Графики переходных действий моделей.
6 СРАВНИТЕЛЬНЫЙ анализ ЭТАЛОННОЙ МОДЕЛИ И РЕАЛЬНОЙ САУ
Среднеквадратическая ошибка рассчитывается по формуле:
Для вычисления СКО в структуру модели добавлен микроблок, реализующий данную формулу:
Описание микроблока: в блок поступают 2 сигнала – с настоящей и эталонной моделей, потом берется их разность и модуль числа, чтоб не было отрицательных значений. Потом, согласно формуле заданы возведение в квадрат и квадратный корень. Блок «Ключ интегратора» описывает количество точек.

Набросок 6.1 – Структура блока СКО.
На выходе блока стоит график, показывающий k2
= 1.
Набросок 6.2 – k
2
= 1.
При
2
= 0,4 вид переходного процесса настоящей модели показан на рисунках 6.3. СКО составляет σ = 3,6237 (набросок 6.4).
Набросок 6.3 – График переходного процесса при
2
= 0,4.
Набросок 6.4 – График СКО настоящей модели при
2
= 0,4.
При
2
= 1,6 переходной процесс имеет последующий вид (набросок 6.5). СКО составляет σ = 3,052 (набросок 6.6).
Набросок 6.5 — График переходного процесса при
2
= 1,6.
Набросок 6.6 – График СКО настоящей модели при
2
= 1,6.
7 синтез АДАПТИВНОЙ САУ С ЭТАЛОННОЙ МОДЕЛЬЮ
Главный задачей адаптивного контура является поддержание сигнала на данной уровне при параметрическом возмущении. Было установлено, что при изменении в объекте
2
меняется и переходной процесс.
При
2
= 0,4 переходной процесс протекает довольно длительно, как следует в адаптивном контуре мы должны уменьшить его время.
При
2
= 1,6 в переходном процессе возникает колебания, как следует нужно их погасить.
Добавим в модель график (набросок 7.1) и поглядим k
2
в объекте.
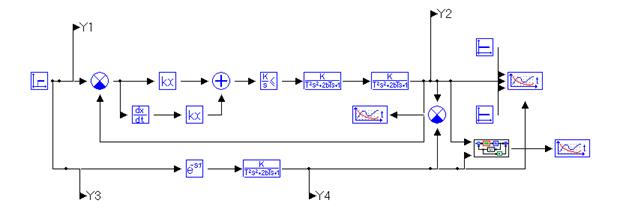
Набросок 7.1 – Схема модели.
Поменяем k
2
на 0,4, а потом на 1,6 и проанализируем изменение различия 2-х сигналов. На рисунке 7.2 лицезреем, что разница сигналов при
2
= 0,4 воспринимает отрицательные значения, а при
2
= 1,6 (набросок 7.3) значения различия положительные и отрицательные. Как следует при построении адаптивного контура нужно учесть значения различия 2-х сигналов и соответственно реагировать на её изменении. В адаптивном контуре будет две параллельных ветки, которые при изменении знака различия 2-х сигналов будут реагировать на изменение
2
в объекте. Для переключения меж ветвями используем ключ 2А.
Набросок 7.2 – k
2
= 0,4.
Набросок 7.3 – k
2
= 1,6.
Для ветки, реагирующей на
2
= 0.4 построим последующую структуру. Когда значения сигнала. Потом усилителем увеличиваем разницу сигналов, чтоб переходной процесс ОУ совпадал с эталонной моделью. Опосля прохождения данной для нас ветки сигнал должен быть отрицательным.
Для ветки, реагирующей на
2
= 1.6, структуру постоем по другому. Когда k
2
= 1.6 в системе возникают колебания, то при помощи производной уменьшаем их. Потом апериодическим звеном первого порядка сглаживаем оставшиеся колебания и уменьшаем время. Опосля прохождения апериодического звена первого порядка сигнал воспринимает отрицательные и положительные значения. Нужно на выходе из 2-ой ветки получить лишь положительные значения сигнала, потому излом пропустит лишь положительный сигнал.
Схема адаптивного контура представлена на рисунке 7.4.
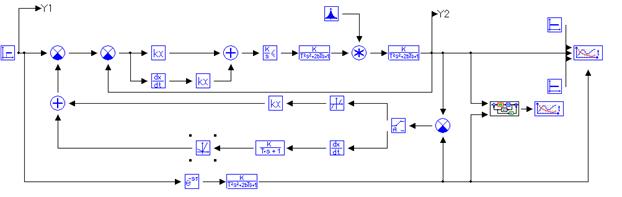
Набросок 7.4 – Схема адаптивного контура.
характеристики применяемых блоков:
1) усилитель с зоной нечувствительности: a = -3.1, b = 3.1, k = 1;
2) усилительkx: k=8;
3) апериодическое звено I порядка:k = 5, T = 0.001;
4) излом: k1
= 0, k2
= 1.8.
Графики переходных действий при
2
= 1,
2
= 0,4 и
2
= 1,6 изображены на рисунках 7.5, 7.7 и 7.9 соответственно. При
2
= 1 СКО равно 0.114, при
2
= 0,4 СКО равно 2.63, при
2
= 1.6 СКО равно 2.2.
Набросок 7.5 — График переходного процесса при
2
= 1.
Набросок 7.6 – график СКО при
2
= 1.
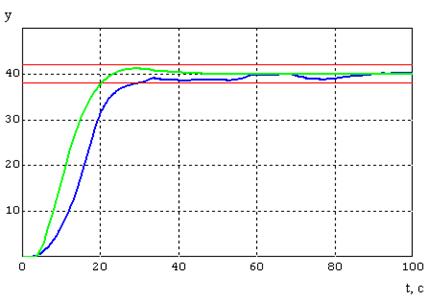
Набросок 7.7 — График переходного процесса при
2
= 0,4.
Набросок 7.8 – график СКО при
2
= 0,4.
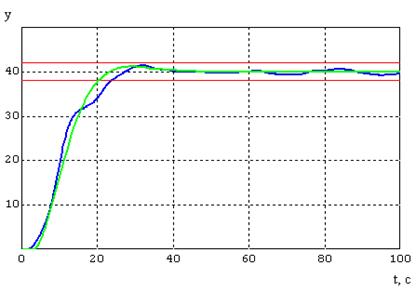
Набросок 7.9 — График переходного процесса при
2
= 1,6.
Набросок 7.10 – график СКО при
2
= 1,6.
Вывод:
В первой части расчетной работы я провел анализ динамических параметров данного объекта управления и сконструировал линейный регулятор, обеспечивающий перевод объекта из исходного состояния в конечное. Также способом незатухающих колебаний Циглера-Никольса были рассчитаны характеристики линейного регулятора.
В процессе выполнения 2-ой части работы — «Синтез адаптивной САУ с эталонной моделью», был проведен анализ динамических параметров САУ, синтезированной в первой части работы. Был проведен сравнительный анализ настоящей и эталонной модели, при использовании разных коэффициентов и проверка среднеквадратической ошибки. Также выбрана эталонная модель.
В итоге была сформирована адаптивная САУ, которая поддерживает уровень сигнала на данном уровне, при этом в адаптивной системе среднеквадратическое отклонение миниатюризируется практически вдвое, соответственно и погрешность уменьшилась.
]]>